It was a heady atmosphere during the 1957 New York Boat Show. The buzzwords were “automotive styling” for boats: prominent space age fins, curved windshields, and chrome. Meanwhile a Raytheon 1700 radar cost just $2,195. What proved the most important development of all, however, was that a group of marine electronics dealers desiring a unified voice formed the National Marine Electronics Association (NMEA).
During the first years NMEA worked on developing better relationships with manufacturers, and over time invited them to join. They engaged the Coast Guard, Federal Communications Commission (FCC) and organizations such as Radio Technical Commission for Maritime Services (RTCM) in discussions. NMEA formally incorporated in 1968, and in the 70s the NMEA News began publication. In time this would morph into Marine Electronics Journal. Finally in 1980, 23 years after its formation, the first NMEA marine electronics communication standard was published. NMEA 0180 was born.
In 1980 the loran was the dominant high tech navigation tool, and autopilots were coming of age. The first NMEA standards bridged the gap between these devices using ASCII English characters and simple serial data communications. NMEA 0180, and its predecessor 0182 version, published in 1982, were a point-to-point communication protocol, and by today’s standards slow and fairly limited. The early versions, however, provided the building blocks for the future.
 |
|
Bill Bishop |
|
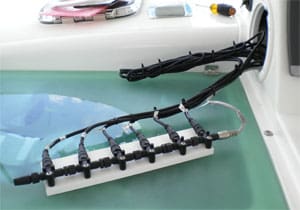
Unlike the handy connectors that are part of the NMEA 2000 standard, NMEA 0183 devices can have a colorful gaggle of thin wires that must be individually connected. |
NMEA 0183 started with version 1.5 (4800 bps), and fairly quickly was upgraded into NMEA 0183 version 2.0 in 1992. Since 1989, NMEA has been collaborating with the International Maritime Organization (IMO), and the International Electrotechnical Commission (IEC). With the adoption of NMEA 0183 version 2.0, the IEC essentially mirrored it and created the now de facto international standard IEC 61152. These efforts continue to this day and the IEC standard now incorporates NMEA 2000 by reference.
Serial interface change
One of the big changes between the first versions of NMEA, and the new one was the switch from RS-232 to RS-422 serial data protocols. This changed the wiring and data interconnection requirements of NMEA 0183. RS-422 supported far high-data transfer rates, and more important it was inherently more resistant to the electrical noise often generated on boats. This was the start of the NMEA communication standard most of us are now familiar with. The newest version, NMEA 0183 4.10, according to NMEA, is in theory backward compatible to version NMEA 0183 2.0. This is generically correct, but factors including manufacturers software can preclude this from actually happening. There is also a NMEA 0183 high speed (38,400 bps) standard used for AIS data transmission, and other higher bandwidth applications.
Technological development has always been the driver in changes to the NMEA standards. When satellite GPS, and AIS information became available, new data packages or “sentences” had to be created. When technologies like loran become obsolete, old sentences are deleted. Currently there are 153 NMEA 0183 sentences.
That’s not the whole picture, however. An issue with the NMEA 0183 communications is that many manufacturers wrote and used proprietary sentences to enhance their own systems’ capabilities. Although the NMEA’s communication standards are consistent, some manufacturers’ software implementation and interpretation may differ. Will a system ignore another system’s proprietary NMEA sentence or choke on it? Does the chartplotter’s software support newly added NMEA features? And so on.
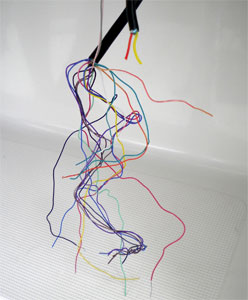
Implementation of NMEA 0183 electrical interfaces have always been a bit clumsy, and at times it can be at best an inscrutably confusing affair. In most cases it consists of a fat wire with many smaller gauge wires with lots of pretty colors hanging out the end of it.
A special vocabulary
Interfacing NMEA 0183 devices requires knowing a special vocabulary. We have “talkers” that send data (TX), and “listeners” that hear data (RX). Talkers can often send data to several listeners, but a listener can only hear one talker. NMEA wiring has assorted, and not very standard, nomenclature. For example TX+ can also be called TX A. Ship grounds may be needed to complete circuits or NMEA grounds might be required. These variants of wiring schemes can make it difficult for someone not familiar with the details to do NMEA connections.
The large players are still supporting the older NMEA 0183 protocol up to a point, and most show no significant pull back from NMEA 183 hardware communications at this time. The overall number of ports available for NMEA 0183 communication doesn’t generally seem to be shrinking. Software support does vary, and shows little efforts are being made to move up to the newer versions of NMEA 0183. Furuno’s NavNet systems, including the new TZtouch via a gateway, supports versions up to 3.0 (circa 2000). Garmin and Raymarine both support versions up to 3.1 (circa 2002), and Simrad supports up to 4.0 (circa 2008).
 |
|
Bill Bishop |
|
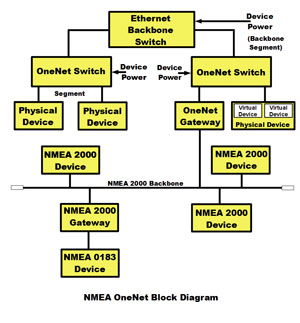
OneNet is NMEA’s high bandwidth network layer that will take advantage of Ethernet. |
Legacy gear
The big reason NMEA 0183 will remain in place for at least a few more years is to support the vast quantities of legacy non-NMEA 2000 equipment such as autopilots that already exist on vessels. In the end NMEA 0183 may very slowly fade into oblivion for marine electronics, but will continue on in other commercial applications.
NMEA 2000 is a form of Controller Area Network (CAN) bus, technology developed in the early 80s by the automotive industry, and which is closely related to the well known, and understood J1939 communication standard managed by the Society of Automotive Engineers. Work started on the NMEA 2000 (N2K) standard in 1994, and was first published in 2001. It took several more years before it was more widely implemented, and like all new standards it was not without some controversy.
One of the notable elements of the N2K standard was the anticipation of capabilities yet to come, that NMEA 0183 technically would never be able to deal with. This included items such as throttle control, engine data interfaces, power monitoring and management and even IMO Electronic Chart Display and Information System (ECDIS) interfaces. What NMEA couldn’t anticipate was the explosion of mobile devices and wireless technologies, and the increasing rate of technological change. N2K, however, solved the majority of the problems associated with older NMEA 0183 protocol, and will eventually replace it. Wiring has largely became plug and play at the connector level. N2K can be up to 50 times faster, prioritizes data flow, all devices can receive and send data, and it supports up to 50 devices. No more talkers and listeners.
Unlike NMEA 0183 there is an industrial physical wiring standard called DeviceNet that NMEA 2000 is based on. The NMEA 2000 wiring uses a backbone cable with tee’s that allows for the connection of drop cables from compatible devices such as chartplotters or wind instruments. The backbone is separately powered by 12 volts DC, and a 120-ohm resistor is installed at each end. Typically this is all standardized, but there are field replaceable connectors available when needed for tight wire pulls. Some manufacturers have developed their own proprietary wire and connector versions such as Raymarine’s SeaTalk NG, and Simrad’s SimNet. These require adapters to connect other standard NMEA 2000 devices.
NMEA 2000 uses parameter group numbers (PGNs) to identify the data form being sent on the network. For example, PGN 127508 is battery status and includes voltage, current, and battery temperature. There are now more than 150 defined PGNs in the standard and many more are in the process of certification. Data is sent in three forms. If the message is eight bytes or less, it is sent as a single CAN frame. Messages of up to 256 bytes, which are the majority of the messages, are transmitted as fast packets, which are a grouping of frames. The last form is a multi-packet, an aggregate of fast packets not exceeding 1,785 bytes.
OneNet
The new NMEA OneNet standard is being designed by NMEA to standardize NMEA 2000 messages over IEEE 802.3 as an Ethernet network layer that will reside above NMEA 2000. Currently Ethernet is used to support data that requires a lot of bandwidth such as radar displays and video and each manufacturer has their own proprietary system such as Garmin’s Marine Network. The first OneNet standard is due to be published in late 2014.
 |
|
Courtesy Actisense |
|
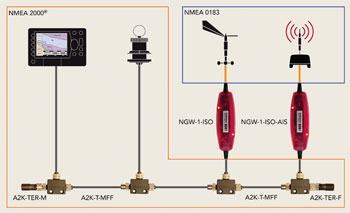
NMEA 0183 devices can be connected to 2000 networks with gateways like the Actisense NGW-1. |
We currently have two standard marine data systems to deal with. The older, and slower NMEA 0183, and the more robust, faster NMEA 2000. Bridging between them requires gateways such as Actisense’s NGW-1. These types of devices translate NMEA 0183 to 2000, and NMEA 2000 to 0183. Gateways can also port NMEA data to PCs via USB, and from CAN bus and other networks. The new NMEA OneNet standard will use gateways to communicate with NMEA 2000.
There are many other forms of networks in the marine market place. CAN bus based systems make up the majority. They include NMEA 2000, J1939 used by many engine manufacturers, and supported by instrument and display manufacturers. There are also derivatives such as Mastervolt’s MasterBus, and Brunswick’s SmartCraft to name a few. Most all of these have the capability to be translated into N2K/0183 readable data with a gateway, although it may be a proprietary device.
Wireless networking
Wireless networks to move vessel information around have become more common with the advent of so many new mobile devices. Raymarine introduced WiFi in its new e7 system in late 2011, and within a year Garmin, Furuno, and Navico gear had the ability to communicate with tablets and phones. Furuno’s WiFi capabilities also now include the uploading of cartography and software updates via the Internet. A variety of other systems, such as Chetco’s open source HTML protocol SeaSmart WiFi system lets you use local mobile devices to access NMEA 0183 and 2000 data, and when connected to a WAN port, ship’s data is available via the Internet. Digital Yacht, Comar, and Brookhouse can provide local WiFi access to NMEA data. There are ongoing efforts to do the same with Bluetooth. Garmin is already using ANT RF technology to stream NMEA data to its new Quatix marine watch, which also acts as an autopilot remote, and man-overboard device.
 |
|
Furuno’s TZ Touch system uses wireless networking approach to move data from a variety of sources to multiple displays. |
The Fusion IP700i marine stereo system is a good example of the difficulties manufacturers can incur when trying to make their products compatible across a broad range of technologies. The original 700 series stereo used a N2K network to talk to their remotes with their proprietary PGNs (none existed for marine stereos). Because the first version provided power to their NMEA 2000 network, you couldn’t easily connect it to an existing powered NMEA network. An adapter cable was added to allow a standard NMEA 2000 network connection. Raymarine integrates to Fusion but they opted to use an Ethernet port. Garmin in turn uses the N2K network for integration. You have to support WiFi too and two Bluetooth modules were needed for iPhone, iPod, iPad and Android mobile devices; one to stream just audio, and a second that supports audio and data for the display. Of course, you also need a SiriusXM satellite connection, USB interface, composite video input and capability to dock almost every single i-device made. The Fusion IP700i is effectively using a bewildering array of networking and communication technologies, and this is just a marine stereo.
Now what does all of this mean when you’re considering buying new, or adding electronics to your boat? What has changed dramatically is marine data networks now have considerably greater capabilities, along with increased technical complexity, and this is where things can get complicated. Gateways translating one communication protocol to another, wireless interfaces such as ANT, and WiFi, along with Ethernet interfaces. Add to this mix the fact that the NMEA 2000 standard allows proprietary sentences (PGNs). This sets the stage for the inevitable creation of partnerships like the recent Raymarine/Victron/Empirbus collaboration to provide digital switching and energy management capabilities unique to them.
How do you figure out what is the best approach to designing marine electronics for your boat? It’s a good question. My first answer is to consider a general rule of thumb. Increased complexity equals reduced reliability. Each owner has to prioritize his or her needs. Start with the minimum. Choose a primary manufacturer carefully, and try as much as possible to use their equipment. A Raymarine autopilot will work with most systems, but it integrates best with a Raymarine system. For those who travel afar, consider having a separate redundant standalone GPS navigation system as a back up. Draw up system block diagrams, identify areas of important single point failures and carry critical spare parts. Lastly study what’s out there, and try to find the voices of those who have used them for better or worse. Cruisers’ forums are a good place to start.
There is nothing worse than not being able to flush your toilet because a computer has failed somewhere in the boat (that actually happened on a boat I worked on as an installer).
In many parts of the world, accessing sophisticated technological components can be a slow and expensive process. Keep systems as distributed as possible to improve redundancy. And lastly, remember that being on the bleeding edge of technology can be both very satisfying and at times frustrating. Remember that many high-tech companies, and their products, can have very short lifespans. The iPad is slightly more than three years old, and it’s in its fourth product generation.
In a Déjà vu sort of way we are right back where we were when the first NMEA standards were released, but in a more complicated way. Manufacturers are still looking for a technological advantage over their competitors. The open source community is still working hard to reverse engineer the standards, and technology is advancing at an even faster pace. NMEA certainly has some faults and detractors, but they are the only reason that any basic compatibility in marine electronics exists in the first place.
Yes, standards development has been slow in the past, but it is getting faster. The work the standards committees do involves a large number of organizations worldwide, and the efforts are mostly handled by volunteers. This is why today you can pick among a huge number of vendors, and have the confidence that NMEA-certified equipment will work with your system.
———-
Bill Bishop is a marine electronics installer based in Sarasota, Fla. He also writes an entertaining blog about some of his installation experiences called the Marine Installer’s Rant – themarineinstallersrant.blogspot.com